Estudo é escolhido como segundo melhor trabalho de doutorado do Brasil
Pesquisas realizadas no Campus Curitiba foram destaque no Robótica 2021, considerado o maior evento de Robótica da América Latina, realizado em outubro. O trabalho "Mobile robots: a studyonsensingandperception systems" foi premiado como o segundo melhor trabalho de doutorado em robótica do Brasil e o “ARENA - Plataforma para Experimentação de Sistemas Multi-Robôs em Ambientes Industriais" teve o projeto premiado como segundo melhor trabalho de mestrado em robótica no país.
O primeiro trabalho foi realizado pelo pesquisador do Programa de Pós-Graduação em Engenharia Elétrica e Informática Industrial (CPGEI), Marco Antonio Teixeira, orientado pelos professores André Schneider de Oliveira e Valéria Arruda.
“O objetivo foi estudar os diversos sensores e técnicas de sensoriamento existentes para robôs móveis, com a finalidade de propor uma nova abordagem de sensoriamento, com identificação de objetos e predição de movimentos”, explica Marco Teixeira, atualmente em residência pós-doutoral no CPGEI.
Durante o trabalho, os pesquisadores estudaram técnicas de sensoriamento utilizadas tradicionalmente por robôs móveis para, posteriormente, ser proposto uma nova abordagem de sensoriamento.
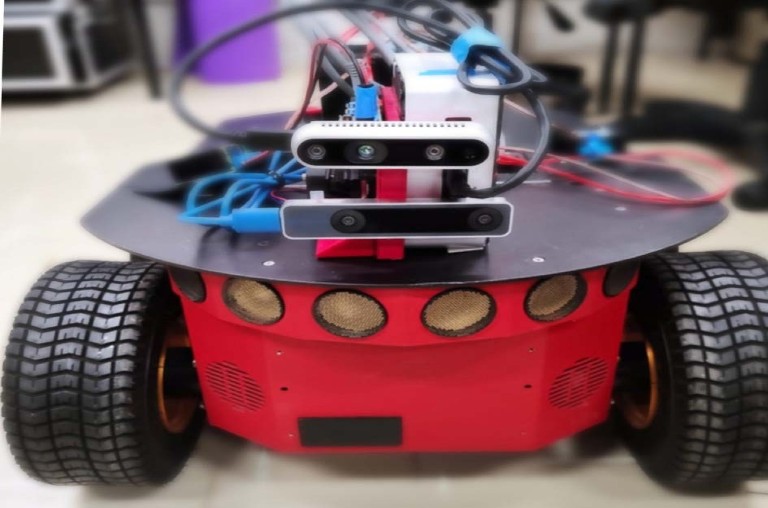
Foi desenvolvido uma abordagem de processamento de dados provenientes de sensores 3D e imagens RGB para a geração de informações, que possam ser utilizadas por um robô.
Segundo o pesquisador, os objetos são identificados em uma imagem RGB e, posteriormente, há a junção da imagem RGB com os dados 3D provenientes do sensor para a identificação destes objetos no mundo real em relação ao centro do equipamento. O equipamento foi então acoplado a um robô móvel.
“Os dados coletados dos objetos são usados para calcular o deslocamento do equipamento no ambiente, direção, velocidade e aceleração. Na análise de previsões, é realizada uma previsão da posição futura de todos os objetos dinâmicos. Esta previsão é capaz de evitar uma possível colisão entre dois objetos dinâmicos no ambiente, por exemplo”, completa.
Todas as pesquisas são realizadas no Laboratório Avançado de Sistemas Embarcados e Robótica (LASER) do Campus Curitiba .